





行星齿轮传动的定义
时间:2018/3/24 14:26:48
行星齿轮传动的定义及特点
齿轮传动在各种机器和机械设备中已获得了较广泛的应用。例如,起重机械、工程机械、冶金机械、建筑机械、石油机械、纺织机械、机床、汽车、飞机、火炮、船舶和仪器、仪表中均采用了齿轮传动。在上述各种机器设备和机械传动装置中,为了减速、增速和变速等特殊用途,经常采用一系列互相啮合的齿轮所组成的传动系统,在《机械原理》中,便将上述的齿轮传动系统统称之为轮系。
一、行星齿轮传动的定义
轮系可由各种类型的齿轮副组成。由锥齿轮、螺旋齿轮和蜗杆轮组成的轮系,称为空间轮系;而由圆柱齿轮组成的轮系,称为平面系统。本书主要讨论平面轮系的设计问题。
根据齿轮系运转时其各齿轮的几何轴线相对位置是否变动,齿轮传动分为两大类型。
1.普通齿轮传动(定轴轮系)
当齿轮系运转时,如果组成该齿轮系的所有齿轮的几何轴线位置都是固定不变的,则称为普通齿轮传动(或称定轴轮系)。在普通齿轮传动中,如果各齿轮副的轴线均互相平行,则称为平行轴齿轮传动;如果齿轮系中含有一个相交轴齿轮副或一个相错轴齿轮副,则称为不平行轴齿轮传动(空间齿轮传动)。
2.行星齿轮传动(行星轮系)
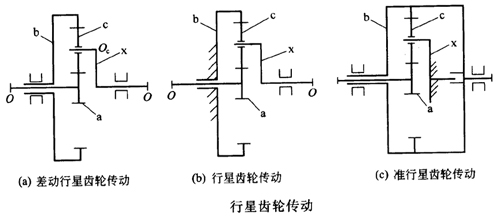
当齿轮系运转时,如果组成该齿轮中至少有一个齿轮的几何轴线位置不固定,而绕着其他齿轮的几何轴线旋转,即在该齿轮系中,至少具有一个作行星运动的齿轮,如图1(a)所示。在上述齿轮传动中,齿轮a、b和构件x均绕几何轴线OO转动,而齿轮c是活套在构件x的轴Oc上,它一方面绕自身的几何轴线Oc旋转(自转),同时又随着几何轴线Oc绕固定的几何轴线OO旋转(公转),即齿轮c作行星运行;因此,称该齿轮传动为行星齿轮传动,即行星轮系。
行星齿轮传动按其自由度的数目可分为以下几种。
(1)简单行星齿轮传动 具有一个自由度(W=1)的行星齿轮传动,如图1(b)所示。对于简单行星齿轮传动,只需要知道其中一个构件的运动后,其余各构件的运动便可以确定。
(2)差动行星齿轮传动 具有两个自由度(W=2)的行星齿轮传动,即它是具有三个可动外接构件(a、b和x)的行星轮系[见图1(a)]。对于差动行星齿轮传动,必须给定两个构件的运动后,其余构件的运动才能确定。
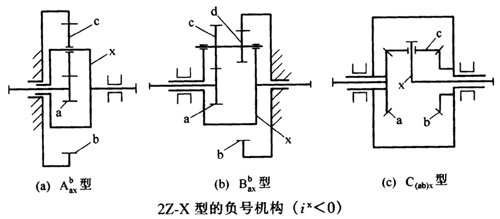
在行星齿轮传动中作行星运动的齿轮c,称为行星齿轮(简称为行星轮)。换言之,在齿轮系中,凡具有自转和公转的齿轮,则称为行星轮,如图1中所示齿轮c。仅有一个齿圈的行星c,称为单齿圈行星轮[见图1和图2(a)];带有两个齿圈的行星轮c-d,称为双齿圈行星轮[见图2(b)和图3]。
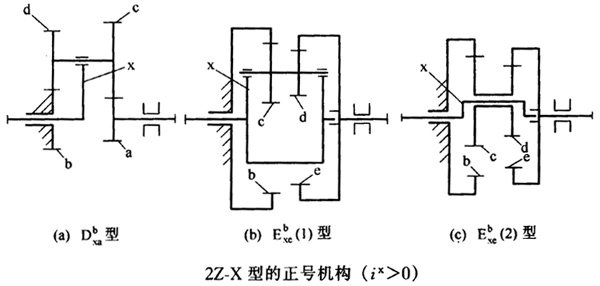
在行星齿轮传动中,支承行星轮c(或c-d)并使它得到公转的构件,称为转臂(又称为系杆),用符号x表示。转臂x绕之旋转的几何轴线,称为主轴线,如轴线OO。在行星齿轮传动中,与行星齿轮相啮合的,且其轴线又与主轴线OO重合的齿轮,称为中心轮;外齿中心轮用符号a或b 表示,内齿中心轮用符号b 或e表示。最小的外齿中心轮a又可称为太阳轮。而将固定不动的(与机架连接的)中心轮,称为支持轮,如图1(b)中所示的内齿轮b.
在行星齿轮传动中,凡是其旋转轴线与主轴线OO相重合,并承受外力矩的构件,称为基本构件,如图1-1中的中心轮a、b和转臂x。换言之,所谓基本构件就是在空间具有固定旋转轴线的受力构件;其中也可能是固定构件,如图1(b)中与机架相连接的内齿轮b.而差动行星齿轮传动[见图1(a)]就是具有三个运动基本构件的行星齿轮传动。在其三个基本构件中,若将内齿轮b固定不动,则可得到应有十分广泛的,输入件为中心轮a或转臂x,输出件为转臂x或中心轮a的行星齿轮传动[见图1(b)]。仿上,当中心轮a固定不动时,则可得到输入件为内齿轮b或转臂x,输出件为转臂x或内齿轮b的行星齿轮传动。当转臂x固定不动时,则可得到所有齿轮轴线均固定不动的普通齿轮传动,即定轴齿轮传动。由于该定轴齿轮传动是原来行星齿轮传动的转化机构,故又称之为准行星齿轮传动,如图书1(c)所示。
为了便于对上述行星齿轮传动进行研究分析,本书特将差动行星齿轮传动(W=2)、行星齿轮传动(W=1)和准行星齿轮传动,统称为行星齿轮传动。